Sulla stabilità di un motociclo rispetto a
perturbazioni laterali.
Candidati: Relatori:
Gianluca D’Aurea Prof.
Ing. Sergio della Valle
Giovanni Palumbo Prof.
Ing. Domenico de Falco
INTRODUZIONE
Il comportamento dinamico di
un motociclo, nelle differenti situazioni operative che possono presentarsi,
risulta ad oggi largamente inesplorato. In merito a tale comportamento, gli
studi cinematici e dinamici finora svolti hanno riguardato il comportamento del
sistema ‘motociclo-guidatore’ ed il controllo del veicolo, con lo scopo di
migliorarne la sicurezza.
Con lo stesso obiettivo, in
questa tesi, ci si è proposti di analizzare la stabilità laterale del sistema,
senza controllo da parte del pilota; per stabilità laterale s’intende, com’è
noto, la capacità del mezzo di riportarsi allo stato di equilibrio
corrispondente alla posizione verticale durante il moto rettilineo, dopo aver
subito perturbazioni esterne generate, ad esempio, da asperità del piano
stradale o da raffiche di vento. Alcuni autori (SHARP [1] ) hanno dimostrato,
risolvendo le equazioni del moto di un modello di motociclo in moto rettilineo
( linearizzato nell’intorno della posizione di equilibrio, nel campo di
velocità di avanzamento compreso tra 3 m/sec e 50 m/sec ) che esso è stabile
rispetto a perturbazioni laterali.
Altri, invece, (COSSALTER [2] ) con un’analisi del tutto simile, ma condotta
con modelli multibody, ritengono che un motociclo che si muova di moto
rettilineo, senza controllo del pilota, sia sempre instabile a qualunque
velocità di avanzamento; ciò implicherebbe che, a seguito di una perturbazione
esterna, seppur lieve, il veicolo cadrebbe.
DESCRIZIONE
DEL MODELLO
Per gli scopi sopra indicati
si è pertanto messo a punto un modello di motocicletta con un codice multibody,
l’ADAMS, per verificarne l’effettiva stabilità laterale.
Il modello consta delle
seguenti parti:
·
Telaio
·
Sospensione
anteriore
·
Sospensione
posteriore
·
Ruota
anteriore e posteriore
Il telaio è schematizzato come un corpo rigido, ed in esso è inglobato il motore e il pilota. La sospensione anteriore è formata dalla forcella, dalla piastra di attacco al telaio e dal gruppo molla-ammortizzatore, supposto di rigidezza costante con il carico, e coefficiente di smorzamento diverso nelle le fasi di estensione e compressione. La sospensione posteriore è costituita dal forcellone e dal gruppo molla-ammortizzatore avente le stesse caratteristiche della sospensione anteriore. Per la schematizzazzione dei pneumatici è stato adoperato il modello FIALA. Le sospensioni sono state collegate al telaio con vincoli di tipo cerniera (revolute joint), capaci cioè di consentire la rotazione relativa tra le parti. Lo stesso tipo di vincolo è stato adoperato per il collegamento delle ruote alle sospensioni (fig. 1).
![]()
![]()
![]()
![]()
![]()
![]()

fig. 1 Schema del motociclo.
DESCRIZIONE
DELLE SIMULAZIONI E DEI RISULTATI.
Una volta terminata la fase
di costruzione del modello è stata effettuata una serie di simulazioni. Assunto
come stato iniziale del sistema quello corrispondente alla posizione di
equilibrio statico, si è supposta agente sulla ruota posteriore la coppia
motrice, fornita dalle curve caratteristiche effettive del motore
corrispondenti ad una legge lineare di apertura dell’acceleratore. All’istante
in cui la motocicletta ha raggiunto una velocità di avanzamento di 30 m/s, si è supposta agente sul
modello una forza trasversale alla direzione di avanzamento, concentrata nel
centro geometrico laterale, per un intervallo di tempo di circa 0,5 sec,
rappresentativa di una raffica di vento. Si è quindi analizzata la stabilità e
trovato il suo limite al variare del modulo della forza.
Dalle simulazioni effettuate
si è riscontrato quanto segue:
·
Per
valori del modulo minori di 160 Newton, il motociclo, dopo aver subito la
sollecitazione, devia dalla traiettoria rettilinea originaria, portandosi, al
termine della perturbazione, su una nuova traiettoria parallela alla precedente
e discosta da essa di una quantità dipendente dall’impulso totale della forza
(fig. 2). La moto, per effetto della perturbazione, ovviamente s’inclina (moto
di rollio) e al termine della stessa si riporta nella posizione verticale. Lo
sterzo compie rapide oscillazioni durante l’intervallo di azione della forza, e
al termine di essa, si riporta nella posizione iniziale (fig. 2).
![]()
![]()
![]()
![]()
![]()

fig. 2: 1;YG=spostamento
laterale 2;R=rotazione dello sterzo 3;F=forza laterale; t=tempo.
Quando il modulo della forza
varia tra 160 e 500N, lo spostamento del motociclo in direzione perpendicolare
a quella di avanzamento si presenta come un’oscillazione smorzata, intorno ad
un valore medio costante, di ampiezza massima dipendente dal modulo della
forza. Lo sterzo manifesta un comportamento del tutto diverso dal precedente:
infatti esso continua ad oscillare per un tempo notevolmente più lungo del caso
precedente intorno alla posizione iniziale, e con una frequenza di oscillazione
molto bassa (dell’ordine di 10-1 Hz ) (fig. 3).
![]()
![]()
![]()
![]()
![]()

fig.3: 1;ZG=spostamento laterale 2;R=rotazione dello sterzo 3;F=forza laterale; t=tempo.
·
Infine
per valori della forza superiori a 500N, la stabilità laterale risulta
compromessa. Il modello infatti, sotto l’azione della perturbazione, devia
dalla traiettoria originaria senza più ritornare in tale direzione, e s’inclina
nel verso concorde alla forza. Successivamente, alla fine della perturbazione,
s’inclina dal lato opposto senza più riuscire a raddrizzarsi fino a cadere
(fig. 5).
![]()
![]()
![]()
![]()
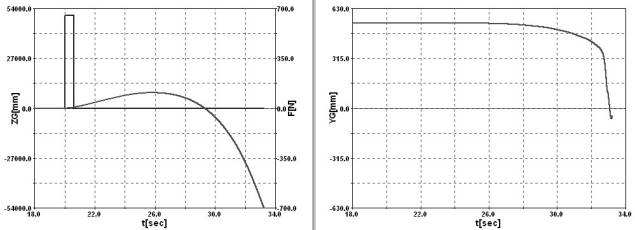
fig. 5: 1;ZG=spostamento laterale 2;F=forza laterale; 4;YG=altezza dal suolo baricentro telaio t=tempo
CONCLUSIONI
Le simulazioni condotte hanno evidenziato che il motociclo, in un ampio campo di velocità e intervallo di valori della forza applicata, presenta comportamento stabile nel senso indicato nell’introduzione. In particolare si è rilevato che le oscillazioni dello sterzo, durante l’azione della perturbazione, hanno frequenza tale da non consentire il controllo da parte del pilota; le stesse invece, al termine dell’azione perturbatrice sono di frequenza molto più bassa e quindi tali da consentire il controllo sul sistema da parte del pilota. Si ritiene che un significativo sviluppo dello studio effettuato potrebbe consistere nell’applicazione di un controllo al sistema, che, soprattutto ad elevate velocità di avanzamento, consenta il recupero della stabilità.
[1] R.S.SHARP, THE STABILITY AND CONTROL OF THE MOTOCYCLES,
JORNAL OF MECHANICAL ENGINEERING SCIENZE, 13, 1971
[2] V.COSSALTER, CINEMATICA E DINAMICA DELLA MOTOCICLETTA,
ED. PROGETTO,1997.