Full Scale Motorcycle Dynamics Rig: Realizzazione del
Controllo Remoto del Banco e Prove Sperimentali
Sommario
Obiettivo della tesi
L’obiettivo di questa tesi era quello di progettare, realizzare, oltrechè verificarne il funzionamento del e mettere a
punto alcuni dispositivi per il controllo remoto del banco di
laboratorio FSMDR del
Dipartimento di Ingegneria Meccanica per l’Energetica, per dedicato ad indagini
sul comportamento dinamico dei motocicli (Figura 1).
|
Figura 1: Full Scale Motorcycle Dynamics Rig |

Il sistema per controllo remoto del banco,
rappresenta un’esigenza di importanza o step fondamentale , dal momento in cui si vogliono eseguire per la
realizzazione di prove sul al banco per almeno due
motivi:.
Assicurare Ciò poiché in ogni tipo di sperimentazione la
ripetibilità, in termini di precisione e controllo delle prove,
affinchè possano essere effettuati gli opportuni confronti dei risultati
ottenuti da questela precisione
ed il controllo, sono parametri
fondamentali che non possono essere trascurati.
Soddisfare le esigenze di sicurezza degli operatori e delle apparecchiature impegnate nell’effettuazione delle prove.
Descrizione delle attività svolte nella tesi.
Con lL’attività
svolta durante la queta tesi, ha avuto come
scopo il raggiungimento di diversi sono stati
raggiunti i seguenti obiettivi che possono essere riassunti nei seguenti puntirisultati per quanto
descritto nel paragrafo precedente:
Ø
Realizzazione
del controllo
del comando dell’acceleratore del motociclo
installato sul banco automaticotramite PC.
Ø Realizzazione di un dispositivo per l’effettuazione
del cambio marcia.
Ø Realizzazione di un modello numerico della sistema moto sul - banco
Ø Esecuzione di prove ripetibilidi messa a
punto dei dispositivi testè citati.
Ø Confronto dei Esecuzione di
prove sperimentali di indagine sul comportamento dinamico del motociclo nel
piano stradale (in-plane dynamic behaviour) e comparazione dei risultati
delle prove sperimentali
con quelli della simulazione numerica.
|
Figura 2: Dispositivo di comando dell’acceleratore |
La prima parte del lavoro è stata rivolta alla progettazione del
comando dell’acceleratore (Figura 2)., Ll’intero
sistema è stato disegnato con al CAD il software (SolidWorks). Per
realizzare tale il comando
è stato scelto un motore passo con elettronica integrata, con avente una
risoluzione angolare di 0,225°.
Terminata tale fase si è passati allo sviluppo di un software in
grado di controllare in maniera adeguata il motore. La prima versione di tale
software è in grado di controllare la posizione e la velocità del motore. Prossimi miglioramenti di tale softwareE’ stata poi intrapreso
lo studio del controllo del funzionamento del motociclo basato su algoritmi
Fuzzy ed implementato il relativo software sul PC dedicato al FSMDR potrebbero essere rivolti allo sviluppo di sistemi
di gestione della moto come il “Cruise Control” o il “Traction Control”.
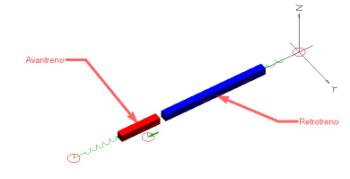
|
Figura 3: modello in-plane dynamics behaviour |

Il
software per il controllo del sistema è stato sviluppato con il LabView v6.
In parallelo con la progettazione e la realizzazione del sistema
di controllo, si è stato sviluppato
il sistema di acquisizione dati ed il un modello
numerico semplificato
del la motosistema
motociclo - banco con il software di simulazione dinamica MSC
WorkingModel
per lo studio dell’ in-plane dynamics
behaviour (Figura 3).
Risultati
I
risultati della campagna di prove fin qui sviluppata sono stati catalogati e
presentati nella parte finale della tesi. A titolo di esempio si riporta in (Figura 4) il confronto
tra le FFT
(Fast
Fourier Transform) della velocità angolare
dello sterzo rilevata durante due prove in condizioni stazionarie di velocità di
avanzamento (30 ms-1)
nella
seconda delle quali è stato perturbato il sistema con un impulso sullo sterzo.
|
|

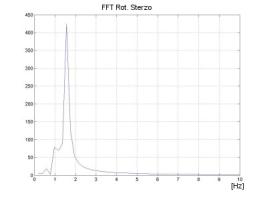
Parallelamente
sono
state effettuate
simulazioni con il modello
numerico. Di queste si riporta a titolo di esempio la FFT della risposta del
modello nelle stesse condizioni dell’esempio
sperimentale descritto precedentemente.
In fine si è effettuato un confronto tra i risultati
delle prove eseguite sul banco, e i risultati del modello numerico,
riscontrando una buona corrispondenza tra i due.
Organizzazione
della tesi
Nell’introduzione
alla tesi si ci sofferma sulle principali nozioni relative alla dinamica del
motoveicolo.
Successivamente
la tesi è suddivisa nelle seguenti parti:
Sviluppo del
sistema di controllo dell’acceleratore.
Possibili
sviluppi di tale sistema, con l’applicazione della teoria "Fuzzy
Reasoning".
Descrizione del
modello numerico. Ipotesi semplificative su cui si basa e obiettivi della
simulazione numerica.
Prove
Sperimentali, in diverse condizioni: terza marcia, e angoli di manetta di 32° e
29°.