UNIVERSITÀ DEGLI STUDI DI NAPOLI
“FEDERICO II”

FACOLTÀ DI INGEGNERIA
DIPARTIMENTO DI INGEGNERIA MECCANICA
PER L’ENERGETICA
SOMMARIO DELLA TESI DI LAUREA
IN
MECCANICA DELLE VIBRAZIONI
APPROCCIO MULTIBODY
ALLO STUDIO DELLA DINAMICA DELLA PIATTAFORMA DI STEWART
Relatore: Candidato:
Ch.mo
Prof. MARCO
SILVERIO
SERGIO DELLA VALLE Matr. 043/3814
Correlatore:
Dott.Ing.
GIANDOMENICO
DI MASSA
Anno
Accademico 2005/2006

 La
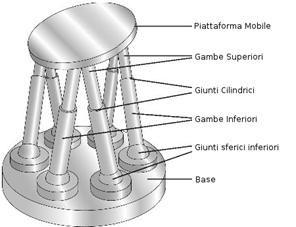
piattaforma di Gough-Stewart (o più semplicemente la piattaforma di Stewart) è
un meccanismo parallelo a 6 gradi di libertà. Nella sua configurazione classica
è costituita da un dispositivo terminale collegato al telaio fisso tramite un
sistema di attuazione parallelo, in cui gli attuatori lineari – che
costituiscono gli arti o gambe della piattaforma – sono disposti
in maniera tale da avere a due a due un punto in comune alternativamente con la
base fissa e l’end-effector: il collegamento avviene mediante 6 giunti sferici
identici sulla base e 6 giunti sferici identici sulla piattaforma mobile.
La
piattaforma di Gough-Stewart (o più semplicemente la piattaforma di Stewart) è
un meccanismo parallelo a 6 gradi di libertà. Nella sua configurazione classica
è costituita da un dispositivo terminale collegato al telaio fisso tramite un
sistema di attuazione parallelo, in cui gli attuatori lineari – che
costituiscono gli arti o gambe della piattaforma – sono disposti
in maniera tale da avere a due a due un punto in comune alternativamente con la
base fissa e l’end-effector: il collegamento avviene mediante 6 giunti sferici
identici sulla base e 6 giunti sferici identici sulla piattaforma mobile.
I primi studi
risalgono al 1813 quando Cauchy
affrontò lo studio delle catene cinematiche parallele, ma ci volle più di un
secolo con V.E. Gough e D.Stewart affinché le grandi
potenzialità di questa tipologia di meccanismi paralleli risultasse chiara alla
comunità scientifica. In linea generale un meccanismo parallelo rispetto a
qualunque meccanismo seriale fornisce infatti una maggiore capacità di carico
grazie alla possibilità di poter ripartire carico di lavoro tra tutti e 6 gli
attuatori, permette un’ottima accuratezza nel posizionamento, consente di
ottenere elevate accelerazioni per l’end-effector ed è caratterizzato da un
costruzione semplice e modulare. Tuttavia lo studio della cinematica e della
dinamica della piattaforma di Stewart (eccezion fatta per la cinematica
indiretta) risulta essere estremamente complesso: sebbene in letteratura sia
possibile trovare numerosi studi che affrontano l’argomento utilizzando diversi
metodi, la complessità delle equazioni a cui si giunge – sia per quanto
riguarda il numero delle equazioni sia per le forti non linearità presenti
nelle stesse – richiede un elevato sforzo computazionale. La conoscenza della
cinematica e dinamica è però estremamente importante nella fase di
progettazione soprattutto per quanto riguarda la messa a punto del sistema di
controllo. Alternativamente alla trattazione analitica, è possibile utilizzare
tecniche di modellazione e simulazione numerica, per esempio di tipo multibody,
che permettono di studiare la cinematica e la dinamica di meccanismi complessi,
senza doverne necessariamente scrivere le equazioni del moto.
Il lavoro svolto
durante tale tesi ha avuto come
obiettivo principale la modellazione multibody di una piattaforma di Stewart, utilizzando
un modello CAD tridimensionale sia per la definizione delle caratteristiche
geometriche inerziali del modello, che per la visualizzazione dei risultati
delle simulazioni.
La modellazione
multibody è stata effettuata con il codice commerciale SimMechanics (modulo di MATLAB), mentre il modello CAD è stato
sviluppato con il software SolidEdge.
La tesi è
suddivisa in 3 capitoli: nel primo vengono inizialmente descritte le principali
caratteristiche dei meccanismi seriali e paralleli e ne vengono rapidamente
elencate le differenze; dopo alcuni cenni storici sull’origine di questa
tipologia di meccanismi e sui principali motivi per cui quelli seriali hanno
avuto uno maggiore utilizzo rispetto ai paralleli, si passa ad una sintetica
trattazione analitica della cinematica diretta, inversa e della dinamica, in
particolare, vengono illustrate le problematiche che questo tipo di studio
comporta e si evidenzia come sia spesso necessario il ricorso a codici di
modellazione multibody per superare tali difficoltà.
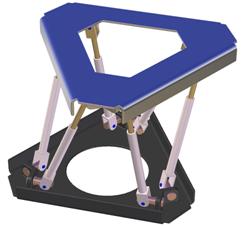
Il secondo
capitolo comprende una descrizione dettagliata del metodo seguito per la modellazione CAD
e multibody della piattaforma. Dopo una prima introduzione al software
utilizzato al fine di evidenziarne le caratteristiche e le possibilità di
impiego, si passa a descrivere rapidamente il modello della piattaforma
illustrata in figura; esso e composto da 14 parti: un telaio di base fisso, una
piattaforma mobile, collegati da sei montanti estensibili, ognuno dei quali è
costituito da due parti una vincolata al telaio fisso e l’altra alla
piattaforma mobile, in tal modo è possibile tener conto delle caratteristiche
d’inerzia anche di tali elementi. 
Si passa
successivamente alla descrizione del modello multibody realizzato con il software
indicato in precedenza: il sistema viene costruito mediante uno schema a
blocchi, nel quale ciascun blocco è rappresentativo di un corpo, un attuatore
oppure un vincolo (Figura
3) e successivamente vengono definite le proprietà di
ciascun componente e le relazioni tra i vari blocchi .
Terminata la
modellazione è stato inserito il sistema di controllo di tipo PID.
Sono, infine,
riportati i principali risultati delle simulazioni effettuate, queste hanno
avuto come obiettivo lo studio sia dell’influenza che hanno i vari coefficienti
del sistema di controllo sulla risposta dinamica del sistema, che delle forze e
degli spostamenti richiesti al sistema di attuazione della piattaforma per
seguire la traiettoria impostata.
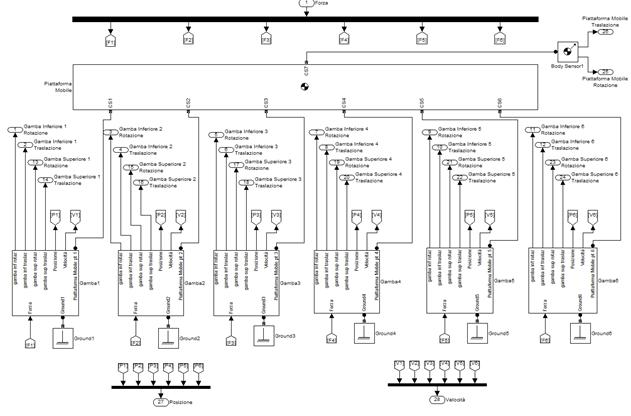
Figura 3
Nel terzo capitolo, infine, viene effettuato un confronto tra
i meccanismi a struttura parallela rispetto a quelli seriali, con risultati che
giustificano il sempre crescente numero di applicazioni a cui al giorno d’oggi
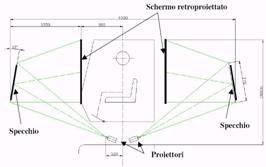
i meccanismi paralleli sono destinati. Successivamente sono presentate alcune
applicazioni delle piattaforme di Stewart che si concludono con la descrizione
dell’impiego di esse come simulatori di guida per l’addestramento dei
carrellisti di cui si riporta uno schema in figura 4.
Figura 4
|
|
Figura 5