Research
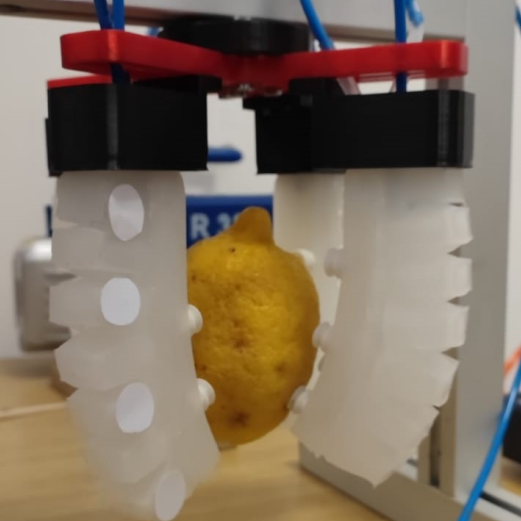
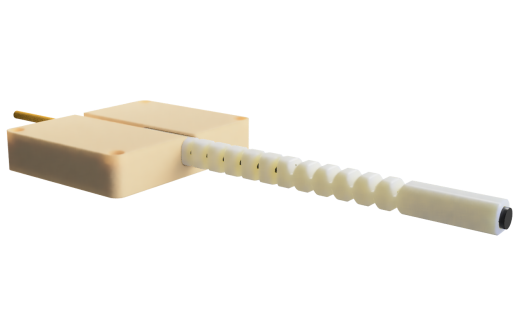
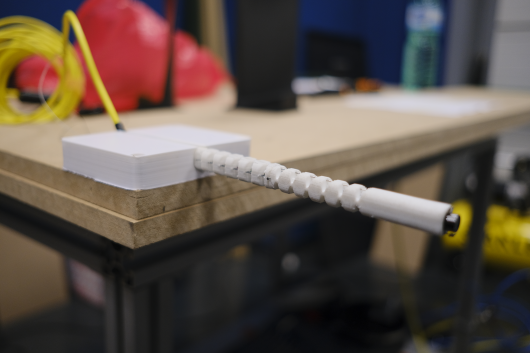
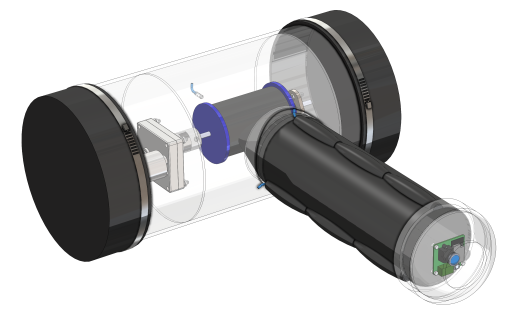
My main research activities are focused on the design and development of soft robots. I am interested in covering all the phases of product design and development of soft robots: design and fabrication, modeling and simulation, planning and control, human-robot interaction. The research platforms I am interested in are: soft actuators, soft grippers, soft manipulators, flexible manipulators, soft exoskeletons.