|
PROGRAM
8:20_ session 1: safe robotics concepts (auditorium)
8:20–8:30 welcome and introduction by the organizers
8:30–8:50 Agostino De Santis, Università degli Studi di Napoli Federico II, I, “Modelling and control for Human-robot interaction” ABSTRACT | SLIDES
8:50–9:10
Irene Sardellitti, Istituto Italiano di Tecnologia, Genova, I,
“Human-friendly robotics: state of the art and future
challenges” ABSTRACT | SLIDES
9:10–9:30
Gianluca Palli, Università degli Studi di Bologna, I,
“Variable stiffness actuation: modeling and control” ABSTRACT | SLIDES
9:30–9:50
Sebastian Wolf, Deutsches Zentrum für Luft– und
Raumfahrt–DLR, Oberpfaffenhofen, D, “From actively compliant lightweight robots to intrinsically compliant systems” ABSTRACT | SLIDES
9:50–10:10
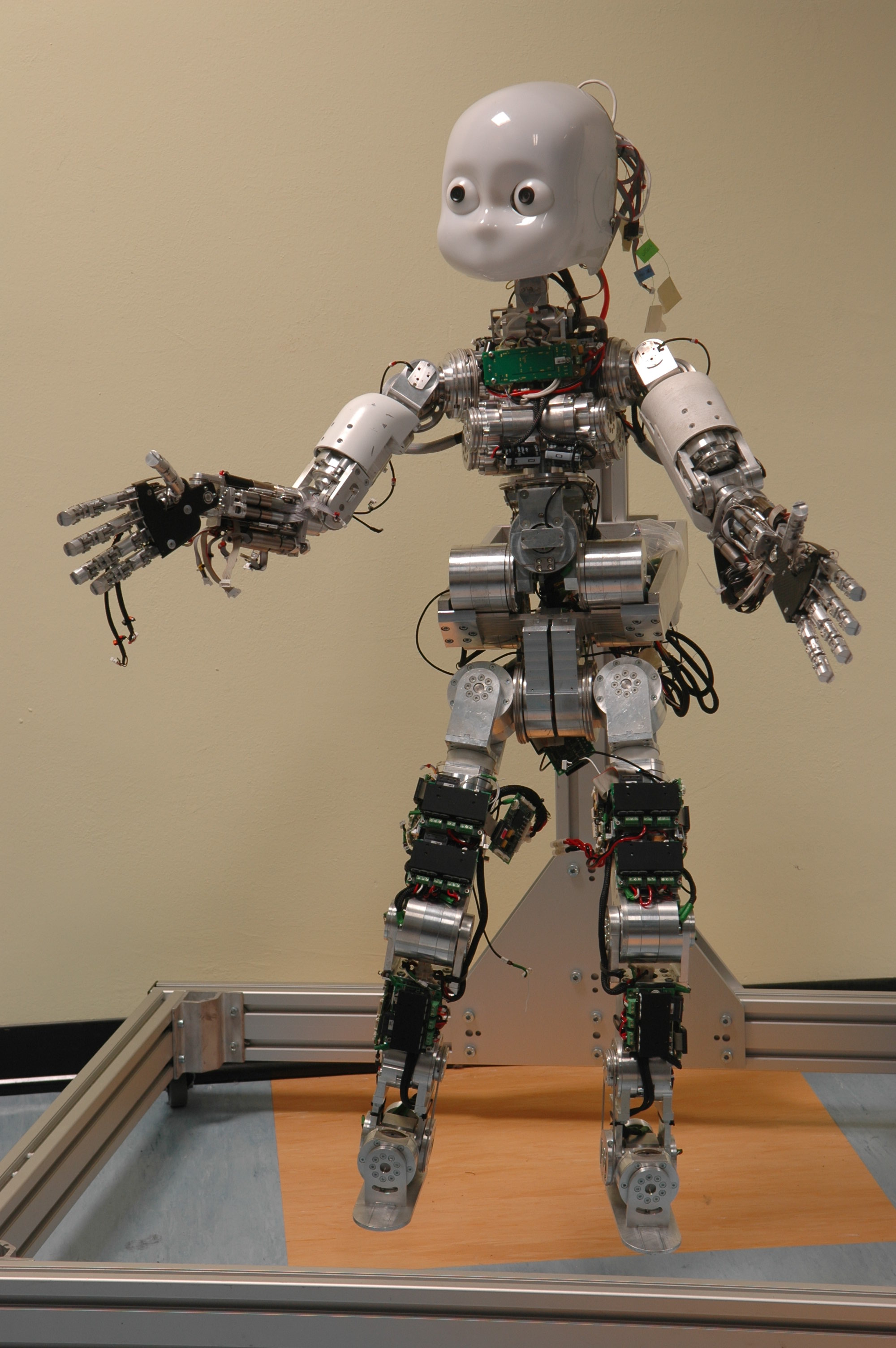
Nikos Tsagarakis, Istituto Italiano di Tecnologia–IIT, Genova, I,
“Incorporating compliance to the ‘iCub’ child
humanoid robot” ABSTRACT | SLIDES
10:10–10:30 Bram Vanderborght, Istituto Italiano di Tecnologia–IIT, Genova, I, “Safe control of a pneumatic muscle powered system” ABSTRACT | SLIDES
10:30_ break
10:50_ session 2: human-centered robotics applications (auditorium)
10:50–11:10 Vincent Padois,
Université Pierre et Marie Curie, Paris, F, “Dealing with
challenging robots, environments and missions: operational space
control in the context of motor learning” ABSTRACT | SLIDES
11:10–11:30
Giovanni Stellin, SSSUP S. Anna, Pisa, I, “Towards real-world
applications of humanoid robotics: the Robot-An Lab case” ABSTRACT | SLIDES
11:30–11:50 Emanuele Cattin, SSSUP S. Anna, Pisa, I, “A case-study of the neuro-robotics paradigm: NEURARM and NEUROExos” ABSTRACT | SLIDES
11:50–12:10 Carlos Pérez Martínez, Universidad Carlos III de Madrid, E,
“Assistive robots dependability in domestic environment: the ASIBOT kitchen test bed” ABSTRACT | SLIDES
12:10–12:30 Paolo Pierro, Universidad Carlos III de Madrid, E, “Robots in future collaborative working environments” ABSTRACT | SLIDES
12:30–12:50 Paolo Robuffo Giordano,
Max Planck Institute for Biological Cybernetics, Tübingen, D,
“The Cyberwalk platform: Human–machine interaction enabling
unconstrained walking through Virtual Reality ” ABSTRACT | SLIDES
15:00_ panel discussion (aula seminari)
15:00-17:00 Robots in everyday environments: suggestions and possible cooperation in the robotics research community
organizers
Agostino De Santis, Università degli Studi di Napoli Federico II
Irene Sardellitti, Istituto Italiano di Tecnologia, Genova
contact
Agostino De Santis, Dipartimento di Informatica e Sistemistica, Università degli Studi di Napoli Federico II,
tel.: +390817683916, e-mail: agodesa ( at ) unina.it
|